USO DO RADAR EM ALTO MAR

Não há um painel de controle de radar padrão e até mesmo os nomes variam de acordo com as diferentes marcas. No entanto, a IMO (Organização Marítima Internacional) possui um conjunto de símbolos padrão para os controles mais importantes, mas eles podem não ser usados em todos os radares.
Os controles básicos usados para ajustar o desempenho de um radar são:
- alimentação/espera/transmissão
- brilho
- ganho
- marcador de título
- alcance
- afinação
- controle anti desordem do mar (STC)
- controle de desordem anti chuva (FTC)
Energia/espera/transmissão
A chave liga/desliga/espera/transmissão geralmente tem três posições. Pressionar o botão liga/desliga ativará o radar para o modo de espera, no entanto, ele não liga imediatamente, pois o magnetron precisa de alguns minutos para aquecer antes de poder transmitir. O radar terá alguma forma de sinal visual para contagem regressiva desse período de espera, sendo o melhor padrão aprovado dentro de 120 segundos. O radar pode então ser mudado para 'transmitir' e em alguns conjuntos um pulso curto ou longo pode ser selecionado neste momento, normalmente o pulso longo seria selecionado. Um pulso longo provavelmente mostrará um eco de um alvo fraco ou de um alvo em um alcance maior. Um pulso curto alcançará uma melhor definição em intervalos curtos.
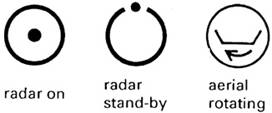
Além de sua função principal de dar tempo ao magnetron para aquecer, no modo 'standby' o scanner não está girando (na maioria dos conjuntos) e é uma forma de economizar energia e prolongar a vida útil do magnetron enquanto mantém o conjunto pronto para uso imediato. É uma boa prática no mar deixar o radar em 'espera' o tempo todo, pois isso evitará a formação de condensação dentro do conjunto de radar.
Brilho

O controle de brilho em um radar analógico (estilo antigo) controla o brilho do traço giratório e também afeta o brilho do eco exibido, por isso precisa ser ajustado para que o próprio traço fique apenas visível, para dar um bom contraste entre o eco e plano de fundo.
Em uma exibição de varredura raster (novo estilo), o controle de brilho regula o brilho da imagem (iluminação de escala), tornando-a clara o suficiente para visualização à luz do dia ou escura o suficiente para não prejudicar a visão noturna do operador.
Ganho

O controle de ganho pode parecer funcionar como o controle de brilho no sentido de tornar a imagem mais clara ou mais escura, mas é completamente diferente, por isso é vital não confundir os dois. O ganho afeta o receptor e não a exibição como o brilho. Aumentar o ganho aumenta a amplificação do sinal de entrada, fazendo ecos fracos parecerem mais fortes, mas confundindo a tela com manchas ou ruídos de fundo, semelhantes aos estalos de fundo de um rádio comum. Diminuir o ganho reduzirá a sensibilidade do receptor e reduzirá o ruído, mas deve-se tomar cuidado para não exagerar, pois ecos fracos ou distantes podem ser perdidos.
Marcador de título
O marcador de rumo e os anéis de alcance podem obscurecer alvos pequenos. Portanto, é uma boa ideia desligar os anéis de alcance quando não estiverem em uso e excluir o marcador de rumo a cada poucos minutos para ver se ele está mascarando um alvo pequeno, bem à frente. O controle de exclusão do marcador de título geralmente é cancelado automaticamente; ou seja, o marcador de título reaparecerá assim que o botão for solto.
Alcance

O controle de faixa regula a faixa na qual o aparelho opera alterando o tamanho ou a escala da área no visor. Mudar o alcance também afeta o comprimento do pulso do radar, PRF (frequência de repetição de pulso) e apresentação de vídeo . Para navegação costeira, você pode selecionar um alcance de 12 milhas para que as características costeiras apropriadas sejam exibidas, para evitar colisões, um alcance de 24 milhas pode ser apropriado, para pilotagem em um ancoradouro confinado, um alcance de ½ milha pode ser necessário.
Os radares podem sobrepor anéis de alcance para dimensionar a distância dos alvos exibidos no PPI. Um recurso mais preciso é o marcador de alcance variável (VRM) que permite que um alvo seja destacado para que suas informações de alcance sejam exibidas em formato impresso.
Nota : Considera-se uma boa prática de vigilância variar o alcance monitorado, de modo a obter o melhor uso da capacidade de detecção do radar.
Afinação

O controle de sintonia pode ser comparado ao controle de sintonia de um rádio comum, pois sintoniza o receptor na frequência do transmissor. Ajustes de afinação ruins podem não ser facilmente reconhecidos na tela. Afinar um pouco para fora eliminará alguns ecos muito fracos, mas ainda produzirá uma imagem clara dos mais fortes, daí a importância do ajuste fino frequente do conjunto. Nem todos os conjuntos têm um controle de ajuste.
Controle de interferência marítima (STC)

O feixe do radar refletirá os ecos do mar ao redor do navio, principalmente se o tempo estiver um pouco ruim. Este resultado será um padrão de explosão solar brilhante no meio da tela que será mais pronunciado na direção do vento. Você pode reduzir isso diminuindo o ganho, o lado negativo dessa solução, no entanto, é que os ecos de alvos mais distantes também serão perdidos.
A solução é o controle da desorganização do mar. Ele funciona reduzindo o ganho do receptor por alguns microssegundos após a transmissão de cada pulso e, em seguida , restaurando-o gradualmente ao seu nível anterior. Funciona muito bem, mas seu uso requer cuidado. Muito controle da interferência do mar resultará na perda de alvos de curto alcance. No mar, o controle de interferência marítima deve ser continuamente monitorado e ajustado.
Controle de interferência de chuva (FTC)

O controle de interferência de chuva reduzirá a interferência na tela devido à chuva e aumentará a chance de ver alvos durante aguaceiros. O efeito ao retornar
Os ecos da chuva na tela geralmente não passam de uma mancha transparente, parecendo um pouco com algodão, mas podem ser densos o suficiente para esconder outros ecos dentro do chuveiro. No entanto, em uma chuva tropical, a chuva pode bloquear completamente todos os ecos, às vezes exigindo que o operador pare a embarcação.
O controle de ruído de chuva funciona fazendo uso do fato de que o eco de retorno da chuva é diferente do eco de retorno de um objeto sólido. O eco de retorno da chuva é muito mais longo e muito menos denso do que o eco de um objeto sólido. O circuito de interferência de chuva funciona passando para o receptor apenas a borda inicial de um eco de retorno. Isso não afeta o eco de retorno de um objeto sólido como um navio, mas ecos de retorno fracos e prolongados da chuva, no entanto, serão enfraquecidos consideravelmente.

Na prática, no entanto, todos os ecos de retorno serão afetados, resultando em uma redução na força de todos os ecos de retorno e uma redução na qualidade da imagem. Às vezes, o controle de interferência do mar pode ser usado para obter um efeito melhor, para ver através da chuva. No entanto, se você adotar essa abordagem, lembre-se de que os alvos próximos também serão perdidos, o que pode anular o objetivo.
Rejeição de interferência (IR)
A Interferência Mútua de Radar é causada por outros radares na localidade operando em uma frequência similar ao radar de sua nave. A interferência aparece como pontos brilhantes

espalhados pela tela ou como um padrão distinto de linhas pontilhadas curvadas para fora a partir do centro da tela. É mais comum em escalas de alcance mais longo, pois em escalas de alcance mais curto apenas alguns dos pulsos de interferência serão exibidos.
Se apenas um outro radar estiver envolvido, isso não é muito sério, mas em áreas de tráfego intenso, a confusão pode ser densa o suficiente para causar confusão. Um circuito de rejeição de interferência pode minimizar esse problema. Funciona rejeitando qualquer eco que não retorne de quaisquer dois pulsos sucessivos. Embora alvos grandes não sejam afetados por IR, alguns ecos pequenos podem ser perdidos. Não há símbolo IMO para IR.
Aprimoramento de eco
Para auxiliar o operador a localizar alvos pequenos, a maioria dos radares modernos tem a capacidade de expandi-los. Normalmente chamado de alongamento ou expansão de eco, seu único objetivo é fazer com que pequenos alvos pareçam maiores. Às vezes, isso pode ser um grande benefício, mas também tende a distorcer a imagem e reduz o alcance e a discriminação de direção. A expansão pode ser útil às vezes, mas deve ser desligada quando não for necessária. Não há símbolo IMO para expansão de eco.
Marcador de cabeçalho e anéis de alcance
O marcador de rumo e os anéis de alcance podem obscurecer alvos pequenos. Portanto, é uma boa ideia desligar os anéis de alcance quando não estiverem em uso e excluir o marcador de rumo a cada poucos minutos para ver se ele está mascarando um alvo pequeno, bem à frente. O controle de exclusão do marcador de título geralmente é cancelado automaticamente; ou seja, o marcador de título reaparecerá assim que o botão for solto.
Controle de Comprimento de Pulso


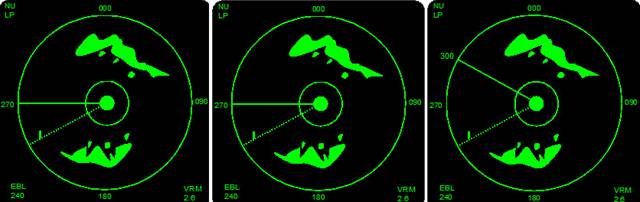
A duração do pulso é normalmente selecionada automaticamente com a escala de alcance. Na maioria dos conjuntos, no entanto, nas faixas intermediárias (6 milhas a 48 milhas em um radar de 72 milhas), é possível selecionar manualmente o comprimento do pulso, o que terá um efeito significativo no desempenho do radar. Um comprimento de pulso longo aumenta a chance de detectar alvos a longa distância. Selecionar um comprimento de pulso curto aumentará a discriminação de alcance, tornando possível distinguir entre um rebocador e seu reboque, por exemplo.

Nos PPIs mostrados, pode-se ver que, quando o pulso longo é selecionado, o pequeno alvo quase morto à frente fica visível, mas o rebocador e o reboque são mesclados e mostrados como um único contato. Além disso, à esquerda, a massa de terra se fundiu com as ilhas.
Quando o pulso curto é selecionado, o pequeno alvo à frente é perdido, mas o rebocador e o reboque são mostrados separados e as ilhas se separaram da massa de terra.
Descentrado
Ao usar o controle de descentralização, o centro da imagem pode ser movido para baixo ou para cima e, em alguns aparelhos mais novos, também pode ser movido para os lados. Mover o centro da imagem para baixo expande o alcance efetivo do radar à frente em detrimento do alcance à ré, por exemplo, em um alcance de seis milhas, o descentramento permitiria que você visse nove milhas à frente, mas apenas três milhas à ré. Isso pode ser uma vantagem ao pilotar, mas pode ser uma desvantagem ao usar o radar para evitar colisões, pois uma embarcação mais rápida pode alcançar sua nave muito rapidamente e você pode não perceber sua presença até vê-la ultrapassando pela janela da casa do leme.
3. Sintonizando o radar
Ligar, sintonizar, desligar
Os vigias devem estar cientes de que os mestres podem pré-sintonizar e bloquear os controles de seus radares (uma função ativada ao pressionar os botões) para parar os violinistas. No entanto, as instruções a seguir se aplicam à maioria dos radares , embora o procedimento possa diferir em modelos mais complexos.
Primeiro, verifique se o scanner está livre para girar para não danificar o equipamento e se nenhum membro da equipe está trabalhando nas proximidades para evitar danos aos tecidos moles causados pelas emissões nocivas de micro-ondas.
É particularmente importante com radares de exibição analógicos mais antigos antes de ligar o radar para primeiro diminuir os controles de brilho e ganho. Os monitores analógicos produzem a imagem direcionando um fluxo de elétrons para um delicado revestimento fluorescente dentro da tela.
Quando o aparelho é ligado pela primeira vez, esse feixe de elétrons é direcionado bem no centro da tela, com o tempo isso resultaria na queima da parte central da tela. Diminuir o brilho e o ganho primeiro reduzirá a intensidade do feixe e evitará danos à tela. Pelo mesmo motivo é uma boa prática no mar, sempre ter algum lixo marinho empregado para não queimar o centro da tela.
Muitos radares rasterscan serão ajustados automaticamente para um desempenho ideal. No entanto, os operadores muitas vezes preferem sintonizar manualmente para garantir o melhor desempenho localmente relevante, de modo que todos os radares têm possibilidade de ajuste manual. A melhor prática para um ajuste manual otimizado é por ordem alfabética. Depois de ligar, ajuste a escala
Brilho . Em seguida, depois de selecionartransmissão ajuste o ganho, o marcador de direção ,o alcance e o ajuste .
Ligando e sintonizando em sequência
Coloque todos os controles no mínimo, pressione o botão liga / desliga e, quando o aparelho aquecer e notificar seu status de espera (até 120 segundos), mude para transmitir

Depois de ligar a energia, você terá que esperar até que o aparelho aqueça, geralmente 120 segundos. Com uma exibição de varredura raster, você pode definir o brilho para se adequar às condições nesta fase.

Enquanto você espera, a maioria das séries fará uma contagem regressiva ou uma luz indicadora acenderá após o término do período de aquecimento. Assim que o aquecimento estiver concluído, o aparelho estará em modo de espera, o transmissor pode agora ser ligado.

Quando o aparelho estiver transmitindo, você obterá algum tipo de imagem. Se necessário, reajuste o brilho. Com um analógico, o brilho/ganho deve ter sido definido como zero, portanto, você deve aumentar o brilho para que o traço da base de tempo fique apenas visível.

Em seguida, com um display analógico, ajuste o ganho até cerca de 70% ou até que o ruído de fundo (speckle) possa ser visto, isso garantirá que ecos fracos sejam vistos.

Com uma exibição de varredura rasterizada, ajuste o ganho até que o ruído de fundo seja visto em toda a tela e, em seguida, diminua-o até que ele simplesmente desapareça.

O marcador de rumo e os anéis de alcance podem obscurecer alvos pequenos. Portanto, é uma boa ideia desligar os anéis de alcance até o momento e verificar se o marcador de rumo está
mascarando um pequeno alvo, bem à frente. O controle de ativação/desativação do marcador de rumo geralmente se cancela automaticamente e reaparecerá assim que o botão for liberado.

Você terá passado algum tempo com os olhos no radar em vez de fora do para-brisa, então agora é prudente fazer uma verificação visual de alvos despercebidos. Compare o visual com o radar na escala de alcance apropriada. Reajuste o ganho se os alvos avistados não forem exibidos. Em seguida, selecione uma faixa adequada para uso. Isso depende da sua capacidade de manobra, mas no mar geralmente será uma das faixas intermediárias. Para um radar de 72 milhas náuticas, o alcance de 12 milhas seria selecionado e, ao mesmo tempo, as verificações garantem que outros controles, como ruído de chuva e rejeição de interferência (IR), estejam desligados.

Em seguida, a melodia é ajustada. Para fazer isso, você precisa receber alguma coisa, mesmo que seja apenas lixo do mar. De preferência, escolha um alvo distante e fraco, pois o efeito do ajuste será mais óbvio. Em seguida, ajuste o botão de ajuste para obter a imagem mais clara e brilhante. Se você estiver no mar, sem alvos visíveis, ajuste o ajuste para interferência marítima máxima.
Ajuste o controle de afinação ligeiramente e aguarde algumas varreduras para ver o resultado. Continue o ajuste fino para obter a imagem mais nítida com a maioria dos alvos exibidos. A maioria dos radares tem um indicador de ajuste para auxiliar. Sintonize o número máximo de luzes de ajuste, mas não confie totalmente no medidor, pois seu olho é o indicador superior. Depois de ajustar, reajuste o ganho para um ruído de fundo leve.

Em seguida, retorne à escala de alcance desejada e ajuste os controles anticonfusão. Em seguida, verifique o VRM em relação aos anéis de alcance e o alinhamento do marcador de rumo em relação à proa do navio. Se um monitor de desempenho estiver instalado, verifique se o desempenho é satisfatório. O radar agora está pronto para operação. Após 10 minutos, verifique novamente o controle de ganho e sintonize novamente o aparelho, porque, à medida que o aparelho esquenta, é provável que a frequência do transmissor tenha mudado ligeiramente. Verifique o ganho, os controles de desorganização e ajuste novamente após cada hora ou mais de operação, pois o aparelho pode desafinar gradualmente.

Lembre-se da sequência alfabética de inicialização - depois de ligar, ajuste o brilho, o ganho, o marcador de direção, o alcance e o ajuste . Antes de desligar o conjunto de radar, gire o brilho e o ganho para o mínimo e desligue os controles anti-desordem. Isso prolongará a vida útil do visor e permitirá que o próximo operador configure o radar usando o procedimento padrão em um tempo mínimo.
Ajuste incorreto dos controles
Se os controles do radar forem ajustados incorretamente, o desempenho do radar será afetado negativamente. Isso pode resultar em alvos pequenos e fracos permanecendo não detectados e alvos maiores sendo detectados em um alcance reduzido. Um bom procedimento de quarto deve garantir que o radar seja cuidadosamente monitorado, verificado em relação ao relógio visual sempre que surgir a oportunidade e sempre ajustado para desempenho ideal.
4. Apresentações de radar
Exibição não estabilizada de movimento relativo
A maioria das pequenas embarcações está equipada com um visor não estabilizado de movimento relativo . Este visor mostra a imagem e não a embarcação em movimento. A nave está no centro da tela e o marcador de rumo está alinhado com 000° no anel de azimute para cima.
Ter sua própria embarcação no centro da tela é fácil para relacionar o mundo real à imagem do radar, pois o lado direito da tela corresponde à visão de estibordo e o lado esquerdo a bombordo de sua embarcação.
Quando o curso da embarcação é alterado, o marcador de rumo permanece para cima em 000°, enquanto toda a imagem gira na direção oposta pelo valor da alteração do curso. Todos os rumos são, portanto, relativos à linha de proa e ré da embarcação. Durante o tempo em que a embarcação está alterando o curso, toda a imagem do radar está girando, tornando o radar inútil até que a embarcação se estabeleça em seu novo rumo. Este lapso de tempo é uma grande desvantagem durante as manobras de pilotagem .

As exibições de proa para cima (SHU) do navio acima mostram a sequência de eventos, como quando sua própria embarcação altera o curso em exibições não estabilizadas de movimento relativo. A esquerda mostra sua própria embarcação em um curso 000°Rel & 270°T. O verdadeiro rumo alvo é:
270°T + 330°Rel = 600° - 360 ° = 240°T rumo alvo.
Sua própria embarcação então altera o curso em 30° para estibordo (para 300°T). A exibição do meio mostra sua embarcação na metade da mudança de curso (15°).
A direita mostra a exibição depois que sua própria embarcação se estabeleceu no novo rumo de 300°T. A direção verdadeira do alvo agora é 300°T + 300°Rel = 600° - 360 ° = 240°T.
Exibição estabilizada de curso ascendente de movimento relativo
As exibições de curso ascendente (CU) abaixo mostram o uso das informações de rumo da bússola eletrônica da embarcação. Isso pode ser uma bússola de fluxo magnético ou uma bússola giroscópica, mas geralmente uma bússola giroscópica seria empregada para esse propósito, pois todos
cursos e rolamentos serão então verdadeiros rolamentos e cursos. O marcador de rumo aparecerá na parte superior da tela e indicará o verdadeiro rumo da embarcação. Os verdadeiros rumos dos alvos podem ser lidos no anel azimutal. Diz-se então que o radar está estabilizado .
Como ainda é a imagem que se move e não a embarcação, a exibição ainda é a proa do navio , o que significa que toda a imagem se moverá quando a embarcação alterar o curso. No entanto, a exibição não será afetada pela guinada, o que torna a exibição estabilizada de curso ideal para evitar colisões.

As telas acima mostram a mesma sequência de eventos desta vez com uma tela estabilizada de curso para cima (CU) do navio. O curso real da embarcação é mostrado na parte superior da tela. Portanto, o rumo do alvo será um rumo verdadeiro.
Nota : que ainda é a imagem que se move.
Exibição de movimento relativo com o norte para cima
O navegador também pode optar por operar a exibição estabilizada no modo norte para cima (NU). No modo NU, a exibição é estabilizada com o norte na parte superior da tela. Quando a embarcação altera o curso, apenas o marcador de rumo se move. Este visor facilita a comparação com a carta e permite a observação contínua dos alvos, mesmo durante a alteração do curso, o que o torna ideal para fins de praticagem .
As exibições acima mostram a mesma sequência de eventos em uma exibição de movimento relativo com o norte para cima.
Nota : apenas o marcador de título se move.
Exibição de movimento real
Com a adição de informações do registro da embarcação, bem como do giroscópio ou da bússola fluxgate, a maioria dos radares modernos pode ser alterada para mostrar o movimento real. Em uma exibição de movimento real, o centro da imagem se move pela tela no mesmo ritmo do movimento real da embarcação. A embarcação é então vista passando pela costa em vez de a costa passar pela embarcação, objetos estacionários como bóias aparecerão estacionários na tela.
O True Motion (TM) é a escolha preferida de muitos operadores para operações de pilotagem , pois você pode observar o progresso de suas embarcações no visor da mesma maneira que faria com um plotter GPS. O movimento real também tem a vantagem de que os ecos de embarcações em movimento podem ser imediatamente distinguidos por suas trilhas, indicando seus verdadeiros cursos, enquanto os ecos de objetos estacionários podem ser prontamente identificados pela ausência de trilhas de eco. Para conseguir isso, o radar deve ser estabilizado no solo.
As exibições de movimento real podem ser estabilizadas no mar ou no solo . Com uma tela estabilizada no mar, as informações sobre o rumo e a velocidade da embarcação na água são transmitidas ao radar. Em uma exibição estabilizada no solo, informações adicionais sobre o conjunto e a taxa da maré também são aplicadas.
O cursor da sua nave pode começar em qualquer ponto da tela e depois se mover para fora em direção à borda. Ele será redefinido automaticamente quando o cursor da sua nave tiver percorrido dois terços do raio da tela ou pode ser redefinido manualmente.
No entanto, para evitar colisões, uma exibição de movimento relativo é preferível, pois calcular o ponto de aproximação mais próximo (CPA) em movimento real é um processo mais complicado.

As exibições acima mostram novamente as mesmas sequências de eventos desta vez com uma exibição de movimento real.
Observação: os objetos em movimento exibem trilhas de eco.
5. Propagação de rádio e desempenho do radar
A onda de rádio
Para melhor interpretar as informações do radar, é necessário entender a propagação das ondas de rádio e como isso limita o desempenho do radar. É vital para o marinheiro entender como um radar funciona, quais informações você pode obter dele e, mais importante, como ele pode enganar o operador não qualificado.
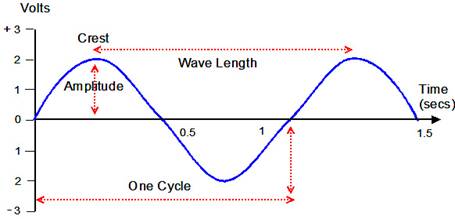
ciclo Uma oscilação completa
frequência O número de ciclos que passam por um determinado ponto por segundo. A unidade de frequência é o Hertz (Hz)
comprimento de onda A distância entre cristas sucessivas
amplitude A altura vertical da onda da crista à linha central
O radar usa energia eletromagnética na forma de ondas de rádio. Nos radares marítimos, as ondas não são transmitidas continuamente, mas em pulsos. Os pulsos viajam para fora em um feixe direcional a uma velocidade constante de 300 milhões de metros por segundo (161.987 milhas náuticas). Quando o pulso do radar atinge uma superfície reflexiva, parte da onda é refletida do objeto, da mesma forma que as ondas sonoras são refletidas de um objeto e produz um eco. Podemos calcular o alcance do alvo com a fórmula:
Alcance = T x S
2
onde :
T = tempo decorrido
S = Velocidade da onda do radar
Tipos de radar marítimo
Banda X ou radar de 3 cm
Os comprimentos de onda do radar são expressos em centímetros, sendo o radar marítimo comercial mais comum de 3 cm (na verdade, 3,1 a 3,2 cm). Isso corresponde a uma frequência de 9300 a 9500 megahertz (milhões de ciclos por segundo) e é chamado de radar de banda X.
Um radar de 3 cm requer um scanner menor para atingir a largura de feixe e a definição desejadas em comparação com um radar de 10 cm. Os radares de banda X são particularmente adequados para navegação costeira e pilotagem devido à sua alta definição e qualidade de imagem. No lado negativo, um radar de 3 cm produz mais lóbulos laterais do que um radar de 10 cm e as ondas de rádio não são refratadas na mesma extensão. Portanto, eles não atingirão o mesmo alcance que um radar de 10 cm.
Banda S ou radar de 10 cm
Outro comprimento de onda de radar marinho comum é de 10 cm (na verdade, 9,2 a 10 cm) com uma frequência de 3000 a 3246 megahertz. Isso é conhecido como radar de banda S. Um radar de 10 cm exigirá um scanner de até 5 metros de comprimento para focar o feixe. No entanto, uma vez produzido, o feixe produzirá menos lóbulos laterais e viajará mais ao longo da superfície, resultando em um alcance máximo maior. Outra vantagem dos radares de banda S devido ao seu maior comprimento de pulso e maior potência é que eles serão menos afetados pela atenuação do que os radares de banda X.
Os radares de banda S são adequados para navegação terrestre de longo alcance e detecção precoce de alvos para evitar colisões, devido ao seu alcance superior e à qualidade coesa de seus pulsos. No lado negativo, os radares de 10 cm requerem um scanner maior, maior potência e frequentemente um comprimento de pulso mais longo, resultando em perda de definição em distâncias curtas.
Um radar de 3 cm é quase sempre a escolha preferida para pequenas embarcações devido aos maiores requisitos de potência e tamanho do scanner do radar de 10 cm.
Transmissões de radar
Força do eco

À medida que o feixe do radar se espalha com alcance crescente, devido à ampla largura de feixe vertical , a potência diminui rapidamente. A energia do radar é inversamente proporcional à quarta potência da distância do scanner.
Feixe horizontal

No plano horizontal, o feixe do radar consiste em um lóbulo principal forte e estreito e lóbulos laterais menores. A largura do feixe horizontal (medida entre os pontos de meia potência do lóbulo principal) é igual a 70 x comprimento de onda dividido pela largura do scanner.
d
onde :
q = largura do feixe horizontal (HBW)
l = comprimento de onda
d = largura do scanner
Viga Vertical
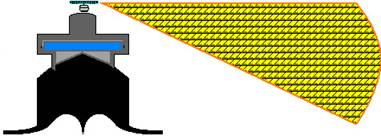
A largura do feixe vertical (VBW) é determinada pela largura do scanner. Deve ser largo o suficiente para fornecer bons ecos de alvo quando a embarcação estiver rolando ou arfando fortemente e geralmente está entre 20° e 30°.
Alcance Máximo e Alcance Mínimo
O alcance máximo do radar depende de vários fatores, incluindo comprimento de onda, frequência de repetição de pulso (PRF), potência de saída, HBW, sensibilidade do receptor e altura do scanner. A experiência e o registro do radar informarão os intervalos de detecção típicos para vários tipos de alvos. O alcance máximo teórico pode ser calculado usando a seguinte fórmula encontrada nas tabelas náuticas.
Alcance em milhas náuticas = 2,21 Ö h + 2,21 Ö H
onde :
Ö = raiz quadrada
h = altura do scanner em metros
H = altura do alvo em metros
O alcance mínimo de um radar depende principalmente do comprimento do pulso e é um pouco mais da metade do comprimento do pulso mais curto, um valor típico seria de 25 metros.
Alcance e precisão de rolamento
A precisão do intervalo depende principalmente da precisão da base de tempo e dos marcadores de intervalo. Não deve exceder 1,5% do alcance máximo da escala de alcance em uso, ou 70 metros, o que for maior. Deve ser calibração em oportunidades adequadas.
A precisão do rumo de um radar depende principalmente do HBW, quanto mais estreito o feixe, melhor a precisão do rumo. A precisão do rolamento será citada no manual do fabricante, mas não deve ultrapassar 1°.
O desalinhamento dos contatos do marcador de direção causará erros de direção e esses alinhamentos devem ser verificados com frequência. Na maioria dos conjuntos com o radar na apresentação de proa do navio, o marcador de proa pode ser ajustado para que indique 000° na escala de orientação por um parafuso de ajuste na unidade do scanner. A melhor maneira de fazer isso é trazer um alvo à frente visualmente e verificar se o mesmo alvo é cortado ao meio pelo marcador de direção no visor. Em uma exibição não estabilizada , ocorrerá um erro de guinada, a menos que a proa do navio seja notada no instante em que o rumo é tomado.
Medição de alcance
Nos radares analógicos, o alcance do alvo é medido eletronicamente por um feixe de luz que se move continuamente pela tela do centro para a borda a uma velocidade equivalente à metade da onda do radar. O feixe de luz forma uma linha chamada base de tempo ou traço na qual os ecos do alvo aparecem.
Em radares rasterscan mais modernos, o alcance é medido eletronicamente. Quando o pulso é transmitido, um sinal de base de tempo muito preciso é produzido no registrador de comutação, correspondendo à velocidade do pulso transmitido. Se um eco de retorno for recebido exatamente ao mesmo tempo em que o sinal de base de tempo é produzido, uma chave é ligada e o eco de retorno é exibido. O alcance é medido por anéis de alcance fixo ou um marcador de alcance variável (VRM).
Comprimento do pulso
Como mencionado anteriormente, o radar não transmite continuamente, porque ecos fracos e alvos próximos seriam mascarados pelo ruído da transmissão, mas transmite em rajadas muito curtas chamadas pulsos. O pulso é transmitido e, em seguida, o receptor escuta um eco de retorno do pulso antes que outro pulso seja transmitido.
O início do pulso é chamado de borda de ataque e o final do pulso é chamado de borda de fuga. Para um pulso de duração de um segundo, o bordo de ataque viajaria 300 milhões de metros antes que o bordo de fuga deixasse o transmissor. Isso é 150.000.000 de saída e 150.000.000 rebate um objeto para retornar ao
transmissor . Se houvesse alvos a menos de 150.000.000 metros (80.994 milhas náuticas), o bordo de fuga da transmissão não teria ultrapassado o transmissor, impedindo que o bordo de ataque mais fraco fosse recebido - se o alvo estivesse a mais de 80.994 milhas náuticas, o bordo de fuga teria limpado o transmissor deixando está pronto para receber. Assim, um radar com comprimento de pulso de um segundo teria um alcance mínimo de 80.994 milhas náuticas. Claro que não existem radares com duração de pulso de um segundo e alcance mínimo de 80.914,5 nm. Os radares marítimos operam entre 0,8µs e 1,2µs
Exemplo
Qual seria o alcance mínimo de um radar com comprimento de pulso de um 1µs (um milionésimo de segundo)?
Alcance = 300.000.000 = 300 metros
1.000.000
para encontrar o intervalo mínimo, divida por 2:
Alcance mínimo = 300 = 150 metros
2
Qual é o alcance mínimo de um radar com comprimento de pulso de 0,8µs?
Alcance mínimo = 0,8 x 150 = 120 metros
Um pulso de radar longo usa mais energia do que um pulso curto com a mesma potência. Ele também viajará mais longe e o eco de retorno produzirá um eco mais visível na tela do radar. No entanto, um pulso curto alcançará uma melhor discriminação e definição de alcance, resultando em uma imagem de radar mais clara.
Portanto, um pulso longo é necessário para detectar alvos em longo alcance e um pulso curto é necessário para definição e boa discriminação de alcance. Para superar essa contradição, a maioria dos radares é equipada com tipicamente 3 a 5 comprimentos de pulso diferentes, de 0,08 a 1,2 µs (milionésimos de segundo). O comprimento do pulso na maioria dos radares é uma função do alcance. Se você selecionar um intervalo curto, um pulso curto será selecionado automaticamente, se você selecionar um intervalo longo, um pulso longo será selecionado automaticamente.
Frequência de repetição de pulso (PRF )
Frequência de repetição de pulso (PRF) é o número de pulsos transmitidos por segundo. Enquanto o alcance mínimo é afetado pela duração do pulso, o alcance máximo é afetado pelo PRF. Deve haver um período nulo entre a transmissão de cada pulso para permitir que o pulso de retorno mais fraco retorne sem colidir e cancelar o próximo pulso de saída. A maioria dos radares terá um PRF diferente correspondente a cada comprimento de pulso. Um PRF típico é de 500 pulsos por segundo para pulso longo e 3.000 pulsos por segundo para pulso curto.
Medição do rolamento
Para obter um rumo preciso, o pulso do radar é concentrado em um feixe estreito no plano horizontal e é girado continuamente em 360° em sincronização com o traço em um radar analógico . O radar assume que, se receber um eco, seu feixe deve apontar diretamente para o alvo em questão. Uma linha na tela chamada de marcador de rumo fornece uma referência de rumo, e os rumos alvo são medidos por uma linha de rumo eletrônico (EBL) ou, em radares mais antigos, por um cursor de rumo.
Comprimento de onda e frequência
O comprimento de onda ( l ) e a frequência (f) da onda do radar são inversamente proporcionais entre si e estão relacionados pela fórmula:
c = lxf
ou :
f = c
eu
onde :
c = A velocidade constante da onda
Exemplo
Com um comprimento de onda de 3 cm a uma velocidade constante de 300 m/µs, qual é a frequência?
f = c = 300.000.000 = 10.000.000.000 Hz = 10.000 MHz
l 0,03
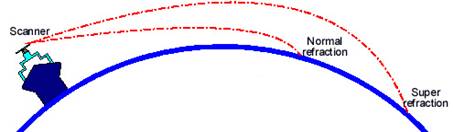
Refração
Se a onda do radar viajasse em linha reta, a distância até o horizonte do radar dependeria apenas da potência do radar e da altura do scanner. Em outras palavras, a distância até o horizonte do radar seria a mesma do horizonte geométrico para a altura do scanner. No entanto, tanto a luz quanto as ondas de radar estão sujeitas a curvatura para baixo à medida que passam pela atmosfera, sendo a quantidade de curvatura maior para comprimentos de onda mais longos. Essa curvatura é conhecida como refração.

Horizonte do radar
As ondas de radar são mais longas que as ondas de luz, então a curvatura devido à refração será maior, resultando no horizonte do radar situado além do horizonte visível. O horizonte do radar em condições atmosféricas normais é cerca de 6% maior que o horizonte visual.
Efeitos do clima
As condições meteorológicas afetam o desempenho do radar de três maneiras:
- condições atmosféricas fora do padrão
- atenuação
- ecos indesejados
O horizonte do radar assume condições atmosféricas padrão de:
- pressão = 1013 hpa diminuindo a 36 hpa / 1000 pés de altura
- temperatura = 15 ° C diminuindo a 2 ° C/1000 pés de altura
- umidade relativa = 60% e constante com a altura.
Na atmosfera padrão, a temperatura e o teor de umidade diminuem relativamente lentamente com a altura e o alcance do radar será normal. Em condições atmosféricas fora do padrão, o alcance do radar será diferente do normal.
Super-refração
A superrefração ocorrerá quando uma camada de ar quente se sobrepõe a uma superfície do mar mais fria (ou seja, inversão de temperatura). O feixe do radar é refratado mais do que o normal, causando um aumento considerável nos alcances de detecção do alvo, normalmente até 25%.
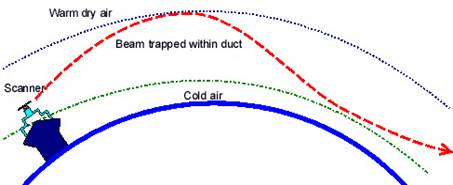
Dutos
Uma forma extrema de super-refração é conhecida como duto, quando o feixe do radar é conduzido por longos períodos dentro de um duto formado por camadas de ar. Quando isso ocorre, intervalos de detecção de alvos excepcionalmente longos podem ser experimentados. É durante os períodos de dutos que os ecos de segundo traço podem aparecer.
Sub-refração
A sub-refração ocorre quando uma camada fria de ar cobre uma superfície do mar mais quente. O feixe do radar é refratado em menos do que o normal, causando alcance de detecção de alvo reduzido.

Atenuação
A atenuação ocorre quando parte da energia do radar é absorvida pelo vapor de água na atmosfera. É maior em chuva forte e pode causar redução severa nos alcances de detecção, mas também pode ocorrer em granizo, neve, granizo e, em menor grau, em neblina. Um radar de 10 cm por causa de sua maior potência será menos afetado pela atenuação do que um radar de 3 cm.
Desordem de chuva
Os ecos da precipitação têm praticamente o mesmo efeito que a poluição do mar. Parece algodão e a força do eco depende da quantidade de precipitação. A chuva forte irá mascarar completamente o eco do alvo, especialmente em radares coloridos de estilo antigo, onde tudo fica vermelho.
Outras causas de atenuação
As nuvens podem causar ecos semelhantes à chuva se forem baixas e tiverem precipitação dentro delas. Outras condições, como tempestades de areia e poeira, fumaça e neblina, geralmente não causam ecos.
Aquisição alvo
A capacidade de um radar detectar um alvo depende de dois fatores: a potência de pico do pulso transmitido e as propriedades reflexivas do alvo.
O alcance máximo de um conjunto de radar dependerá da potência de pico do radar, da altura do scanner, das condições climáticas e das propriedades reflexivas do alvo. A potência de pico para um radar de banda x varia de cerca de 1,5 kW para um radar de 12 nm a 25 kW para um radar de 120 nm. Um mínimo de 3 kW é necessário para perfurar o nevoeiro, 4 kW será mais eficaz. Uma potência consideravelmente maior é necessária para transmitir na banda S.
As propriedades reflexivas do alvo incluem:
- Tamanho
- material
- aspecto
- textura da superfície
Tamanho alvo

Todas as outras coisas sendo iguais, um alvo grande refletirá mais energia de micro-ondas do que um pequeno. Portanto, produzirá um eco mais forte e aparecerá na tela como uma imagem mais brilhante em um alcance maior.
Material alvo
Alvos de material duro e denso com boas propriedades condutoras fornecem os ecos mais fortes. Rocha e concreto são bons refletores, mas o melhor refletor é o metal. A madeira é quase invisível ao radar, porque a madeira tende a absorver as microondas em vez de refleti-las. Areia e lama também produzirão um eco muito fraco. O GRP e os plásticos são refletores ruins porque as microondas passam direto por eles.
Aspecto alvo

Um alvo com aspecto de 90 ° em relação ao feixe do radar refletirá a maior parte das micro-ondas de volta ao scanner e produzirá o eco mais forte.

Alvos em ângulos oblíquos refletirão a maior parte da energia em outras direções e retornarão um eco fraco.
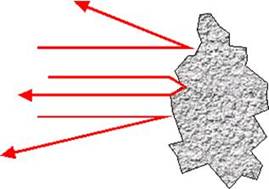
Se a superfície do alvo for irregular, pelo menos parte da energia de micro-ondas será refletida de volta.
Forma alvo

De um modo geral, as superfícies planas são melhores refletores de radar do que as curvas ou pontiagudas. Portanto, o melhor refletor será uma superfície plana perpendicular, como o costado de um navio.

Uma esfera é um refletor ruim, pois só retornará um eco daquela parte que está em ângulo reto com o feixe, que é um ponto refletor muito pequeno no centro. O restante das micro-ondas será refletido para fora e perdido.

Um cilindro é um refletor de radar moderado. Como uma esfera, ele só refletirá da parte que está voltada para o feixe do radar.
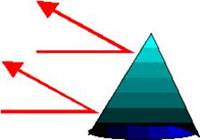
Um cone é um refletor muito pobre. Ele reflete toda a energia para cima e para longe.
Textura da superfície
Uma superfície lisa espelhada perfeita produziria um eco muito fraco, a menos que estivesse perfeitamente alinhada em ângulos retos com o pulso do radar. Na prática, isso raramente ocorre, quase tudo inclui irregularidades na superfície, que dispersam o pulso, de modo que parte dele retornará ao scanner. Portanto, um alvo com uma superfície áspera espalha a energia uniformemente e dá um eco justo em qualquer aspecto.
Alvos práticos
A intensidade do eco e o alcance de detecção de alvos práticos, como linhas costeiras, balizas e outras embarcações, dependem de uma combinação de todas as características mencionadas anteriormente, sendo o aspecto o fator mais importante. Um grande navio-tanque, em um ângulo agudo para você, pode não dar um retorno tão forte quanto um pequeno feixe de barco de pesca no pulso do radar. Um objeto cilíndrico como um farol (a menos que esteja equipado com um refletor de radar) pode emitir um eco muito fraco, apesar do fato de que pode ser facilmente visto a olho nu. Montanhas e litorais aparecerão por causa de sua forma e não de sua altura. Você nunca pode ter certeza de qual parte da massa de terra está refletindo melhor e, portanto, não pode ter certeza exatamente do que está vendo na tela. A experiência dirá qual alcance de detecção esperar para cada tipo de alvo. Os ecos mais fracos,
Nota : a partir de um navio em movimento, a apresentação do alvo na tela pode alterar conforme o aspecto muda.
Ajudas de navegação
Refletores de radar
Os refletores de radar são instalados em embarcações ou bóias de navegação ou outros recursos cartografados para melhorar suas propriedades reflexivas, de modo a torná-los visíveis ao radar de busca. Existem dois tipos de refletores de radar:
· passivo
· ativo
Refletores de radar passivos
Embarcações ou outros objetos construídos em madeira ou GRP são quase invisíveis ao radar. Se essas embarcações aparecerem no radar de outra embarcação, elas devem estar equipadas com um refletor de radar. Todos os refletores de radar funcionam com base no princípio do refletor de canto,
quando duas placas planas formam um canto, o canto tem a capacidade de refletir diretamente de volta para onde quer que o sinal esteja vindo.

A maioria dos refletores de radar são melhorias neste princípio, cuja base é que três placas em ângulos retos entre si darão ao refletor a capacidade de refletir um sinal forte em um ângulo amplo, tanto horizontal quanto verticalmente. Para cobrir todos os ângulos, os refletores de radar são geralmente dispostos em grupos, sendo o tipo mais comum o octaédrico (refletores de 8 cantos).
Clusters octaédricos funcionam bem se forem montados corretamente. Nunca deve ser preso a uma adriça por nenhum de seus pontos. Isso destrói grande parte da capacidade de reflexão. É melhor montá-lo rigidamente com uma de suas faces abertas voltada para cima, de modo que o dispositivo possa reter água no copo. Isso é conhecido como a posição de captura de chuva.

Mostrado acima é um refletor de radar octaédrico. O refletor de radar teria um desempenho melhor se fosse montado rigidamente na posição 'captura de chuva' e abaixo do tipo encapsulado mais novo de refletor de radar pode ser içado no mastro em uma adriça.

Refletores de radar ativos
Existem dois tipos de refletores de radar ativos ou transponders de radar que são usados para auxiliar o navegador a identificar objetos cartografados:
- racons
- marcações
guaxinim
Um pequeno transmissor de pulso é montado no farol, que quando acionado pelo pulso do radar de uma embarcação irradia um sinal de identificação em todas as direções. O scanner do navio só pode receber este sinal quando o scanner é apontado na direção do farol. Assim, o pulso será exibido na tela no rumo correto, mas devido ao pequeno atraso na transmissão, o início do pulso será exibido em uma faixa maior do que o eco verdadeiro.
Devido ao sistema de escaneamento utilizado, a marca será exibida na tela apenas de forma intermitente ou a cada poucas varreduras. O verdadeiro eco do farol aparecerá na tela em frente ao sinal de identificação, quando estiver dentro do alcance.

A figura acima mostra um Racon ( código morse O). Racons são particularmente úteis para mostrar objetos que, de outra forma, seriam difíceis de identificar, por exemplo, uma importante marca de navegação em uma área de tráfego intenso, um ponto isolado em um litoral sem características ou a entrada de um importante canal de navegação.
Ramarks

A figura acima mostra um ramark ( marcador ra dar ). Os ramarks transmitem pulsos continuamente ou em horários especiais, em vez de receber o pulso do radar de uma embarcação. Eles aparecem na tela como uma linha radial brilhante do centro da tela até a borda e são identificados dividindo a linha radial em uma série de pontos ou traços. Sua maior desvantagem é que podem mascarar outros ecos importantes na tela. Ramarks agora são raros, não há nenhum nas águas australianas.
Transponders de busca e salvamento (SART's)

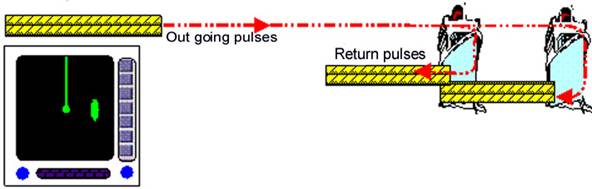
Um SART é um transponder de radar portátil alimentado por bateria que opera em “banda x ou radar de 3 cm”. Em uma situação de emergência, quando o SART detecta o pulso do radar vindo de uma aeronave ou navio em busca, ele responde transmitindo um sinal distinto que aparece na tela do radar da embarcação em busca como uma série de 12 blips estendendo-se aproximadamente 8 milhas náuticas para fora do A posição do SART ao longo de sua linha de orientação. Figura 35.
Quando um SART não está sendo interrogado pelo radar de busca, o receptor do SART está varrendo rapidamente a banda do radar, procurando por sinais de radar. Como todos os radares marítimos não operam exatamente na mesma frequência dentro da “banda x”, pode haver um pequeno atraso na resposta do SART, pois o SART trava no sinal de radar de busca. Quando o receptor SART estiver travado no radar de busca, haverá um atraso quando o SART mudar do modo de recepção para o modo de transmissão.
Esses atrasos resultarão em um pequeno erro de alcance e, portanto, o primeiro blip da resposta SART pode estar a alguma distância fora da posição correspondente à localização real do SART. Em alcances médios de cerca de 6 nm, o atraso de alcance pode estar entre 0,6 nm e 150 metros. À medida que o SART é abordado pelo radar de busca, o atraso de alcance não deve ser superior a 150 metros.
Ao procurar um SART, o IMO recomenda que uma escala de alcance de 6 ou 12 milhas (com pulso curto selecionado) seja usada porque o espaçamento entre as respostas SART é de cerca de 0,6 nm ou 1125 metros e é necessário ver várias respostas para distinguir o SART de outras respostas.
Um transponder de busca e salvamento (SART) é mostrado abaixo.

Transponders de radar anticolisão
Os transponders de radar anti-colisão produzirão uma linha de cinco blips em 1 nm na tela de radar de uma embarcação em interrogatório. Uma embarcação transportando o transponder também será alertada sobre a presença de outras embarcações por um sinal de alerta visual ou sonoro quando estiver sendo interrogada pelo sinal de radar da outra embarcação.
Monitoramento de desempenho
Um monitor de desempenho informa ao operador do radar se o radar está operando com eficiência total ou não. Ele deve ser usado quando o aparelho for ligado pela primeira vez e em intervalos frequentes depois disso, quando nenhum alvo estiver presente na tela. A falta de alvos pode ser devido à falta de alvos, mas também pode ser devido ao baixo desempenho do radar.
Existem dois tipos de monitores de desempenho, externos e integrados. Ambos os tipos utilizam uma caixa de eco de metal montada atrás do scanner e ressonante com a frequência do radar para capturar parte da energia transmitida pelo radar.
O tipo externo faz uma longa linha tipo pluma na tela na direção da caixa de eco. O comprimento da pluma depende do seguinte:
- potência transmitida
- sensibilidade do receptor
- afinação correta
O monitor dá uma indicação da eficiência do conjunto. O comprimento da pluma é medido quando o conjunto é instalado e conhecido por ter um bom desempenho. Se a qualquer momento a pluma for mais curta, um ou mais dos fatores acima podem ter se deteriorado e levado em consideração isso, ou a falha corrigida. O tipo embutido é usado da mesma maneira, mas produz um padrão circular cujo raio é medido.
A figura à esquerda mostra a pluma de um monitor de desempenho externo. O comprimento do qual, de acordo com o diário de bordo do radar, deve ser de 1 nm. Algum reajuste do radar é necessário.

O diário de bordo do radar
O diário de bordo do radar tem duas funções, uma técnica e outra operacional. Do lado técnico, as informações registradas no diário de bordo incluiriam: manutenções e reparos realizados, sobressalentes a bordo e seus números de peça, detalhes técnicos e de desempenho e informações sobre arcos de sombra e setores cegos. Do lado operacional, as informações registradas no diário de bordo incluiriam: detalhes dos alcances de detecção para vários tipos de alvos e informações sobre os alcances de detecção de objetos visíveis.
Padrões de performance
Recomendações sobre padrões de desempenho para equipamentos de radar podem ser encontradas nos guias IMO, Classe e AMSA para equipamentos de radar, referidos como tipo testado.
Precauções de instalação, manutenção e segurança
Hoje, não é mais necessário um técnico para instalar um radar . É só prender o radar e o scanner com alguns parafusos, conectar os cabos, aterrar o aparelho e ligar na fonte de alimentação. O cabo que conecta a unidade de exibição ao scanner pode ser fornecido em comprimentos personalizados para se adequar à instalação específica. O cabo nunca deve ser cortado.
Ao instalar um radar, a unidade do scanner deve ser posicionada o mais alto possível para fornecer o melhor alcance possível e livre de obstruções para evitar setores de sombra. Também não deve estar tão próximo de outros equipamentos eletromagnéticos que causem interferência e deve estar longe de calor excessivo ou vibração, mas acessível para manutenção. Uma vez instalado, a precisão do marcador de alcance e rumo deve ser verificada por pessoal competente e os limites de quaisquer setores de sombra estabelecidos e registrados no diário de bordo do radar e exibidos em um cartão próximo ao radar.
A unidade de exibição deve ser posicionada de modo que fique ao alcance do navegador e voltada para a frente para facilitar a observação. Ele deve estar em um nível e posição convenientes para observação e manutenção, longe da bússola magnética, de outros equipamentos eletromagnéticos e da exposição ao clima. Se o radar estiver embutido, certifique-se de que haja boa ventilação na parte traseira do aparelho.
Manutenção e solução de problemas
A manutenção de radares modernos é relativamente simples. Em primeiro lugar, leia e siga as instruções do guia do operador do fabricante. Mantenha um registro do radar e registre nele a manutenção, o serviço, as falhas e os reparos, pois podem ser inestimáveis para ajudar o técnico do radar a diagnosticar um problema.
Os radares são geralmente muito confiáveis e precisam apenas ser protegidos contra água, calor e danos físicos. Um programa de manutenção regular consistiria em verificar periodicamente os parafusos e suportes de montagem, mantendo as conexões da fiação limpas, apertadas e as conexões da fiação externa untadas com uma fina camada de vaselina. O conjunto em si deve ser mantido limpo e livre de spray de sal.
A solução de problemas envolveria primeiro verificar se a unidade está recebendo energia e se o procedimento correto de inicialização foi seguido. Se a fonte de alimentação estiver OK, todas as conexões estão limpas e apertadas, o disjuntor principal ou fusível está OK, os fusíveis internos estão corretos e o scanner está livre para girar e o conjunto ainda não funciona, então provavelmente é hora de chame um técnico.
Precauções de segurança
O pessoal deve evitar o risco de radiação de micro-ondas mantendo-se afastado de um scanner em operação. Se estiver trabalhando no alto na unidade do scanner ou em outro equipamento próximo à unidade do scanner. Garanta que:
- a unidade de radar está desligada, a energia desconectada e um sinal colocado na tela informando aos outros que você está trabalhando no ar
- clipe em um arnês de segurança
- amarre em uma bolsa de ferramentas que não derramará se invertida
- não levante ou abaixe ferramentas elétricas pelo cabo
- se possível, peça a alguém para ajudá-lo
Os circuitos de alta tensão dentro da unidade do visor podem causar eletrocussão e não devem ser tocados, exceto por pessoal qualificado com o radar desligado. A unidade de exibição possui tensões potencialmente letais dentro da unidade, mesmo depois de desligada.
Observação: Uma boa regra a ser lembrada é se a parte de trás tiver que ser removida, deixe isso para os especialistas.
Onde colocar o scanner
A localização da unidade do scanner requer consideração cuidadosa para que um compromisso possa ser alcançado entre o efeito da altura no desempenho do alcance e a interferência do mar e a necessidade de minimizar setores de sombra e ecos falsos. Quanto mais alto o scanner for colocado, mais pronunciado será o retorno da interferência do mar.
O scanner deve ser montado em uma estrutura que não torça e cause erros de rolamento. Para garantir que o marcador de rumo indique a verdadeira linha de vante e de ré
da embarcação, o scanner deve ser posicionado o mais próximo possível da linha central da embarcação.
Onde colocar o display
O seguinte deve ser considerado ao posicionar a unidade de exibição:
· de acordo com os regulamentos marítimos, as instruções de instalação incluem a distância mínima segura que o visor deve ser montado da bússola magnética.
- a luz emitida pela unidade de exibição não deve interferir na observação visual quando a ponte estiver no escuro.
- deve ser possível para dois observadores visualizarem o display simultaneamente com qualquer viseira instalada removida.
- o monitor deve ser montado de modo que um observador fique voltado para frente ao visualizá-lo, de modo que uma observação visual à frente possa ser mantida.
- o monitor deve ser montado com rigidez suficiente para não ser afetado negativamente por vibração e longe de calor e fumaça excessivos.
- quando os ajustes da bússola estão sendo feitos, o conjunto de radar deve estar em operação.
6. Informações de radar falsas
ecos falsos
O radar pode nos enganar exibindo alvos que podem nem existir. Estes são chamados de ecos falsos.
Ecos laterais
A compressão natural de uma onda de rádio multidirecional em uma onda de radar direcional nunca é totalmente alcançada. Nem toda a onda do radar pode ser focalizada pela antena do radar no lóbulo principal. Alguns escapam para o que é conhecido como lóbulos laterais. Os ecos laterais são causados por reflexões dos lóbulos laterais do feixe do radar. Eles provavelmente aparecerão quando um alvo for um bom refletor de radar e estiver ao alcance dos lóbulos laterais mais fracos.

O verdadeiro alvo sempre será o eco mais forte no centro do padrão. Os ecos laterais podem ser removidos reduzindo o ganho ou usando o controle de ruído do mar.
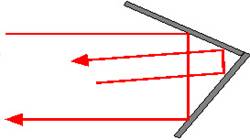
ecos indiretos

Os ecos indiretos são causados quando parte da energia do radar de saída é refletida de um objeto próximo ao scanner, como um funil ou mastro. O eco pode retornar pelo mesmo caminho ou diretamente para o scanner. O eco falso aparecerá (geralmente de forma intermitente) no visor na faixa correta porque a distância adicional entre o scanner e o objeto refletor será insignificante, mas no rumo da obstrução. O alvo verdadeiro também aparecerá no visor no alcance e rumo corretos.
Os ecos indiretos geralmente ocorrem em setores de sombra, no entanto, eles podem aparecer em rolamentos onde não há setores de sombra. Os ecos indiretos geralmente estão associados a funis e outros objetos grandes próximos ao scanner.
Embora o rumo do alvo real possa mudar, o rumo do alvo desviado permanecerá constante e pode, se o alcance estiver diminuindo, parecer estar em rota de colisão. Para determinar se o alvo é um eco indireto ou não, altere o curso cerca de 10°, se o rumo relativo do eco permanecer constante, então o eco é falso. Alternativamente, o ganho pode ser reduzido ou, se o eco aparecer em um setor cego conhecido, ele pode ser ignorado.
A outra forma de ecos refletidos ou indiretos usa alvos fortes, como edifícios, pontes ou grandes navios, geralmente ao navegar em rios ou portos. Embora parte do feixe do radar seja devolvido ao scanner, grande parte dele é desviado em outras direções, mas a curta distância pode produzir um feixe que será refletido do alvo secundário. Isso aparecerá no visor no mesmo rumo que o alvo forte, mas em um alcance maior. Ele também aparecerá em sua posição correta, portanto não deve ser um grande problema.
Vários ecos
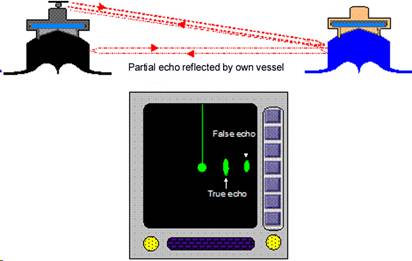
Vários ecos são causados quando um eco forte chega de volta à sua embarcação e é refletido, retransmitindo efetivamente o sinal. Para que isso ocorra, o outro alvo deve ser grande e próximo, e tanto o alvo, que pode ser um alvo terrestre como uma ponte ou promontório ou outra embarcação, quanto o seu navio devem ser bons refletores de radar. Os ecos falsos (que podem ser qualquer número) aparecerão em múltiplos da faixa verdadeira no mesmo rumo. Vários ecos podem ser removidos reduzindo o ganho.
Interferência

As transmissões de radar de outra embarcação na localidade em uma frequência semelhante ao radar da sua embarcação podem causar interferência semelhante à figura acima. Na maioria dos radares , essa interferência pode ser eliminada ligando o controle IR.
Setores de sombra e cegos
Obstruções como funis, mastros ou equipamentos de arrasto no caminho do scanner podem causar sombras ou setores cegos na tela, nos quais os alvos podem ser perdidos ou detectados apenas em alcance reduzido ou não detectados. Como a onda do radar se curvará até certo ponto ao redor de obstruções por difração, alguns alvos em setores de sombra serão exibidos às vezes, enquanto alvos em setores cegos não serão detectados.
A antena do radar deve sempre ser posicionada de forma a minimizar sombras e setores cegos.

Um bom método para verificar se há setores cegos ou de sombra é encontrar uma seção de água ligeiramente agitada e desligar o controle de interferência do mar. Se não houver setores cegos ou de sombra, a exibição preencherá um arco de 360° com uma massa de pequenos contatos, causados pelos ecos retornados das ondas. Quaisquer listras escuras irradiando para fora do centro representam setores cegos ou de sombra.
Se houver setores cegos ou setores de sombra, seus limites devem ser determinados e registrados no registro do radar da embarcação. A desordem do mar é uma maneira de determinar esses limites, ou um sextante pode ser usado. O melhor método, no entanto, é observar uma pequena embarcação-alvo na borda de um curto alcance, pois o curso da sua embarcação é alterado. Nota: o rumo quando o alvo desaparece e depois reaparece.
Ecos de segundo traço
Ecos de segundo traço aparecerão às vezes durante períodos de super-refração severa ou dutos. Alvos em alcance muito longo aparecerão em um alcance falso no rumo correto, na segunda varredura da base de tempo . Em outras palavras, um eco pode retornar de um alvo distante depois que um segundo pulso foi transmitido e o receptor está aberto.
Quanto maior o PRF, maior a probabilidade de ocorrência de ecos de segundo traço à medida que mais pulsos são transmitidos e o período de silêncio correspondente é reduzido. Os retornos do segundo traço geralmente podem desaparecer alterando a escala de intervalo em uso.
Outras causas de ecos falsos
Ao navegar em rios e portos, os cabos de energia aéreos próximos podem retornar um eco da direção em que o cabo está em ângulo reto com o feixe do radar, o efeito na tela é um pequeno eco que está se aproximando em rota de colisão. O eco desaparece quando a embarcação está próxima do cabo aéreo, pois o feixe do radar não está mais em contato com o alvo.
Distorção da largura de feixe
A distorção da largura de feixe está diretamente relacionada à largura de feixe do radar, que é amplamente determinada pelo comprimento do scanner. Um pequeno scanner de 60 cm terá uma largura de feixe de cerca de 7°, enquanto um scanner de 2 metros produzirá uma largura de feixe de cerca de 1,2°
Um eco do alvo será exibido na tela durante todo o tempo que o feixe do radar leva para varrer o alvo. Isso terá o efeito de ampliar todos os alvos, estendendo cada lado em um ângulo igual à metade da largura de feixe do radar. Portanto, o radar com uma largura de feixe de 2° mostrará um alvo pequeno, como uma bóia, como um arco de 2° de largura. Uma ilha com 10° de largura parecerá ter 12° de largura e um promontório parecerá estender-se 1° além do mar do que realmente se estende.
Mostrado abaixo, a pequena bóia pode ter apenas ½° de largura, mas à medida que o feixe do radar gira, ele pintará a bóia a partir do momento em que o bordo de ataque do feixe toca a bóia pela primeira vez e durante todo o tempo ele varre a bóia até que o bordo de fuga seja livre da bóia. Portanto, na exibição do radar, a bóia aparecerá com 2° de largura.

A vantagem de larguras de feixe maiores é que alvos menores e mais fracos serão pintados em tamanho maior na tela, portanto, eles terão uma chance melhor de serem detectados por uma embarcação pequena conforme ela se move no mar. O lado negativo é menos resolução de rolamento e discriminação de rolamento pobre.

A largura do feixe é muito importante quando você está procurando uma passagem estreita entre as ilhas, uma entrada de porto estreita ou uma entrada de rio. Devido à distorção da largura de feixe , um radar com uma largura de feixe grande não conseguirá ver a lacuna até muito perto.
Mostrado acima, o iate com radar de largura de feixe estreito poderá ver a entrada do porto na tela do radar, pois o feixe pode caber inteiramente entre as cabeceiras. No entanto, para o iate com o radar de largura de feixe largo, a entrada permanecerá oculta e a costa parecerá contínua até que o iate esteja muito mais próximo.
O efeito da distorção da largura de feixe pode ser melhorado reduzindo o ganho, mas lembre -se de aumentá-lo novamente depois.
O alcance em que seria possível que uma lacuna estreita fosse visível no radar pode ser encontrado pela fórmula:
Alcance = distância
Pecado BW
onde :
distância = tamanho da lacuna
BW = largura de feixe
Exemplo
Você está se aproximando de um porto vindo do mar, cuja entrada tem 0,07 milhas náuticas de largura, seu radar tem uma largura de feixe de 6°. A que distância você esperaria ver a entrada no radar?
Alcance = distância = 0,07 = 0,67 nm
Sin BW 0,104528
Discriminação de alcance e rolamento
Discriminação de alcance
A discriminação de alcance é significativa, pois pode afetar o alcance operacional útil do radar. Um pulso longo usa mais energia e detectará um alvo em um alcance maior. No entanto, um pulso longo também tem um lado negativo. Mostrado abaixo, um radar transmitindo em pulso longo pode ter um comprimento de pulso de 300 metros; Parte da borda de ataque do pulso será refletida no navio mais próximo, enquanto parte continuará a ser refletida no segundo navio. Antes que o bordo de fuga do pulso atinja o primeiro navio, o bordo de ataque já estará voltando, de modo que os ecos dos dois navios se fundirão. Em vez de ver os dois navios separadamente no visor, eles aparecerão como um único alvo.
Se o comprimento do pulso for mais que o dobro da distância entre dois alvos, os ecos serão mesclados.
Um comprimento de pulso mais curto, digamos 100 metros, manterá os ecos separados.

Portanto, um pulso curto é necessário para uma boa discriminação de alcance e um comprimento de pulso longo é necessário para detectar alvos fracos em longo alcance.
Para superar essa contradição, a maioria dos radares é capaz de operar em diferentes comprimentos de pulso nas faixas intermediárias. Por exemplo; você pode estar tendo dificuldade em distinguir uma rocha isolada ao largo da costa do próprio litoral (como os dois objetos se fundiram) em pulso longo a um alcance de 24 milhas. Ao mudar para pulso curto, a rocha agora pode aparecer na tela como um objeto separado.
Discriminação de rolamento
A discriminação de rolamento é semelhante à discriminação de alcance, pois governa a capacidade do radar de discriminar entre dois alvos próximos, mas desta vez para distinguir entre dois alvos próximos no mesmo alcance. O feixe do radar pode ser comparado a uma fatia de pizza rotativa , um pequeno alvo será pintado na tela durante todo o tempo que o feixe leva para passar por ele. Assim, se dois alvos próximos puderem ser cobertos pelo feixe ao mesmo tempo, eles aparecerão no visor como um único alvo. A discriminação do rolamento depende do HBW, quanto mais estreito o feixe, melhor a discriminação do rolamento.

Um radar HBW amplo receberá ecos de ambos os alvos ao mesmo tempo, pois ambos estão dentro do feixe. Eles aparecerão na tela como um alvo.

Um radar HBW mais estreito passará entre os alvos e, portanto, os ecos aparecerão separadamente.
HBW depende do tamanho do scanner, um pequeno scanner de 60 cm de largura produzirá uma largura de feixe de cerca de 7°, enquanto um scanner de matriz aberta de 1800 cm produzirá uma largura de feixe de 2°. A discriminação do rolamento pode ser melhorada reduzindo o ganho.
7. Navegando com radar
rolamentos
Medição do rolamento
O fator crucial na navegação por radar é identificar corretamente as características visíveis do radar que são reconhecíveis na carta, bem como na tela do radar. Torres, monumentos, edifícios e outras características proeminentes que são favoritas da navegação por bússola não serão visíveis no radar. No entanto, objetos como promontórios, ilhas, bóias e balizas serão, com a vantagem adicional de serem igualmente utilizáveis de dia ou de noite.
Sua nave está sempre no centro da tela (exceto em uma tela de movimento real) e os rumos são lidos na escala de graduação ao redor da circunferência da tela.
Com uma exibição estabilizada para norte ou rumo para cima , onde o radar é conectado a uma bússola giroscópica, o marcador de rumo sempre apontará para o curso verdadeiro que está sendo direcionado. Portanto, todos os rumos dos alvos lidos na escala de graduação ao redor da circunferência do visor serão verdadeiros rumos .
Em uma exibição de head-up do navio, onde o marcador de rumo sempre aponta diretamente para cima até 000° na escala de graduação. Todas as marcações serão Relative Bearings , ou seja, relativas à proa do navio ou à linha de vante e ré da embarcação.
Os rolamentos relativos podem ser representados por dois métodos:
· Vermelho 0° a 180° ou Verde 0° a 180° dependendo se estão a bombordo ou estibordo do marcador de proa. Ecos para bombordo seriam lidos como vermelho 0° a 180° e ecos para estibordo seriam lidos como verde 0° a 180°.
· Configuração circular 000° a 360°. Medido a partir da proa do navio (000°) no sentido horário. Um rumo de eco de 30° para estibordo seria lido como 030° Rel. e um eco de 30° para bombordo seria lido como 330° Rel.
Observação: para evitar confusão, todos os rolamentos são identificados da seguinte forma. As cores sempre procedem os graus:
G90° = Verde 90°
R90° = Vermelho 90°
Para rolamentos relativos , Rel seguirá os graus e todos os rolamentos relativos estarão na configuração de três figuras:
090°Relativo = 090°Rel.

Na figura acima:
O alvo A seria chamado; R40° ou 320° Rel.
O alvo B seria chamado; G38° ou 038° Ref.
Como seriam chamados os alvos C e D?
Nota : todos os radares que possuem EBL usam o método relativo de configuração circular 000° a 360°.
Antes que o rumo relativo possa ser usado para navegação por radar ou para evitar colisões , o verdadeiro curso da embarcação deve ser conhecido. O verdadeiro curso sendo direcionado é encontrado aplicando a soma do desvio e variação (erro da bússola) ao curso da bússola que está sendo direcionado.
Em seguida, o rumo relativo do alvo deve ser convertido em um rumo verdadeiro. Isso é feito adicionando o rumo relativo ao curso verdadeiro da embarcação. Se esse valor exceder 360°, o que significa que você passou pelo norte, então 360° deve ser subtraído da resposta.
Ao usar rumos relativos vermelhos ou verdes, os rumos verdes serão adicionados ao curso verdadeiro e os rumos vermelhos serão subtraídos. Então:
Curso verdadeiro + Rel. rumo = rumo verdadeiro
Curso verdadeiro + rumo verde = rumo verdadeiro
Curso verdadeiro - Rumo vermelho = Rumo verdadeiro
Exemplo
A direção do seu navio é 035° Bússola - Variação 7° Leste - Desvio 4° Oeste.
Rumo alvo 030° Rel. Encontre o rumo verdadeiro do alvo?
Seu navio bússola 035°
Desvio 4° Oeste Dev. 4° Oeste
Magnético 031° Var. 7° Leste
Variação 7° Leste CE. 3° Leste
Curso verdadeiro 038°T
Rumo verdadeiro do alvo.
Proa do navio verdadeiro + Rumo relativo = Rumo verdadeiro
038° + 030° = 068°
Rumo verdadeiro do alvo = 068°T
Usando o marcador de rumo eletrônico (EBL)
O EBL é uma linha reta do centro da tela até a borda da tela que é usada para medir a orientação de objetos de seu navio, da mesma forma que uma bússola faria. Em uma exibição estabilizada, os rumos obtidos com o EBL serão verdadeiros e com uma exibição não estabilizada , os rumos serão relativos às linhas de vante e ré do navio .
Para obter o rumo de um objeto, simplesmente ajuste o EBL até que ele corte o centro do objeto e leia o rumo da leitura do EBL no visor.
Os radares modernos incorporam uma melhoria no EBL usando um cursor eletrônico. O cursor geralmente é uma cruz que pode ser movida pela tela usando um trackball ou outro dispositivo apontador. Simplesmente coloque o cursor sobre o objeto escolhido e leia o alcance e direção do objeto a partir das informações do cursor exibidas na tela.
Usando um cursor de orientação
Os radares analógicos mais antigos geralmente não possuem um EBL, em vez disso, os rolamentos são medidos por um cursor de rolamento. Esta é uma linha inscrita em uma tela de plástico transparente, colocada sobre a parte superior da tela do radar. Esta linha pode ser movida mecanicamente para obter um rolamento. O uso de um cursor mecânico pode produzir os seguintes erros:
· Se o ponto central do radar não estiver diretamente sob a marca central do cursor de rumo, os rumos obtidos serão imprecisos. Isso é chamado de erro de centralização.
- O operador deve visualizar o radar de forma a visualizar sempre o cursor de direção passando pelo ponto central. Como a tela do cursor de rumo não está encostada na tela do radar, se você recuar um pouco, por exemplo, a linha do cursor parecerá se mover fora do centro, causando um erro no rumo. Isso é chamado de erro de paralaxe.

A exibição superior da UC acima mostra um alvo medido pelo cursor como estando em um rumo de 300° em um alcance de 4,2 milhas. Como o radar está em um curso estabilizado para cima , o rumo será um rumo verdadeiro.
A exibição inferior acima mostra um alvo em um rumo de 240° conforme medido pelo EBL . Ao medir um rumo com o EBL, ele deve cortar o centro do alvo.
Com um display SHU não estabilizado , qualquer direção tomada será relativa à linha de vante e de popa da embarcação e não à bússola verdadeira. Portanto, para encontrar o rumo verdadeiro, o rumo relativo deve ser adicionado ao rumo verdadeiro do navio.

Mostrado acima, o rumo da embarcação é 345°T. O alvo medido pelo EBL está em um rumo relativo de 240°. Para encontrar o verdadeiro rumo dos alvos, o rumo relativo dos alvos é adicionado ao rumo da embarcação.
Para encontrar o rolamento verdadeiro:
Proa do navio 345°T
Rumo relativo + 240° Rel
= 585°
- 360°
Rumo verdadeiro 225°T
Erro de guinada
Com exibições instáveis , a maior fonte de erro é o erro de guinada . À medida que uma embarcação se move no mar, a proa da embarcação estará continuamente à deriva alguns graus de cada lado do curso pretendido antes que o timoneiro ou o piloto automático possam corrigir o movimento. Portanto, é fundamental que o rumo exato do barco seja anotado no momento em que o rumo do radar é obtido. Uma guinada de 3° no momento errado produzirá um erro de 3° no rumo do radar.
Este problema pode ser superado pelo timoneiro observando o curso da bússola no instante em que o navegador toma o rumo do radar. Mas isso só pode ser feito se você tiver o luxo de um timoneiro, uma raridade. Se você tiver dois EBLs, é possível alinhar um dos EBLs com um objeto quase morto à frente, enquanto usa o segundo EBL para obter as orientações. Se a embarcação guinar, o navegador verá isso imediatamente e ajustará o rumo do radar de acordo.
Erro de largura de feixe
Uma segunda fonte de erro é o erro de largura de feixe . O radar assume que o scanner deve estar apontando diretamente para o alvo para receber um eco, ele começará a “pintar” um alvo na tela assim que a ponta de seu feixe tocar o alvo pela primeira vez e continuará pintando até que o bordo de fuga da viga tenha passado por ela. Portanto, um radar com largura de feixe de 5° mostrará um alvo pequeno, como uma bóia, como se tivesse 5° de diâmetro, enquanto um radar com largura de feixe de 2° o mostraria como 2° de diâmetro. Então, se você está tomando uma direção de radar de um pequeno contato, o EBL deve cortar bem no centro do alvo.
O radar ampliará alvos maiores como promontórios; as bordas da cabeceira farão com que um eco seja pintado enquanto são iluminadas por qualquer parte do feixe. Quando a borda dianteira do feixe estiver tocando a cabeceira, a borda do eco no visor aparecerá no rumo do centro do feixe naquele instante. O erro será, portanto, metade da largura do feixe na direção da terra.
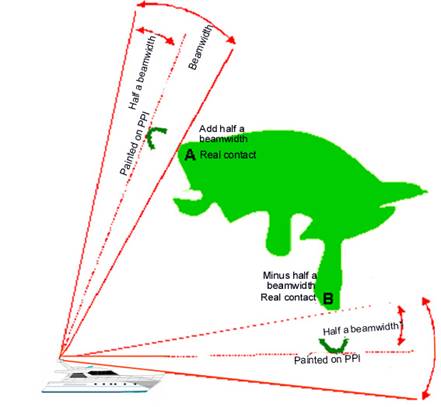
Exemplo
Acima, o radar da embarcação tem uma largura de feixe de 6° e o curso da embarcação é 090°T. O EBL mostra que o rumo verdadeiro da cabeceira “A” é 015°T e a cabeceira “B” é 080°. Encontre o rumo verdadeiro de ambas as cabeceiras?
A largura de feixe deste radar é de 6°, o contato será estendido a uma distância equivalente a metade da largura de feixe para o mar, portanto, uma correção de 3° em direção à terra precisará ser aplicada.
Cabeceira A 015° (correção de ½ largura de feixe em direção à terra) + 3° = 018°
Cabeceira B 080° (correção de ½ largura de feixe em direção à terra) - 3° = 077°
Com uma exibição instável , o erro de guinada e o erro de largura de feixe se combinam para tornar os rumos do radar pouco confiáveis e só devem ser usados com extremo cuidado. Uma exibição estabilizada eliminará o erro de guinada, portanto, você só terá que se preocupar com a largura do feixe. Tendo em mente os efeitos do ajuste de ganho, ajuste, controles de interferência de chuva e mar e expansão de eco, as direções do radar tomadas com tolerância para largura de feixe produzirão resultados razoavelmente satisfatórios.
Gamas
Medindo alcances de radar
O radar é inerentemente melhor na faixa de medição do que na medição de rolamentos: afinal, faixas de medição é para o que ele foi projetado especificamente. Além disso, como título de
a embarcação é irrelevante ao tomar um alcance, a maior fonte de erro, erro de guinada, é eliminada. Normalmente, a precisão do alcance do radar é melhor que 1% da escala de alcance em uso.
Usando o marcador de intervalo variável (VRM)
Todos os radares são equipados com anéis de alcance fixo e os alcances dos alvos podem ser estimados usando os anéis de alcance fixo. No entanto, a maioria dos navegadores prefere desligar os anéis de alcance fixo (porque eles tendem a sobrecarregar a tela) e usar o marcador de alcance variável (VRM).
O VRM é um anel de alcance ajustável cuja distância do centro da tela pode ser variada pelo operador. O raio do VRM é indicado no display do VRM na tela. Mmuitos radares agora oferecem um VRM controlado por cursor que medirá o rumo e o alcance ao mesmo tempo.
A precisão do VRM pode ser verificada colocando o anel variável exatamente sobre vários anéis fixos sucessivamente e observando qualquer discrepância nas leituras indicadas. Tais discrepâncias podem ser consideradas como erro VRM e podem diferir em diferentes distâncias do centro.
Quer você use controles tradicionais ou trackball, o método de uso é o mesmo. O alcance de um alvo é medido movendo o estroboscópio VRM ou o cursor até que ele apenas toque, mas não corte, a borda mais próxima do alvo. Para obter a melhor precisão possível, use sempre a escala de menor alcance disponível. Qualquer combinação de rolamentos de radar e alcances de radar (e outros meios) pode ser usada para fixar sua posição.
Flutuante EBL e VRM
Muitos conjuntos de radares modernos são equipados com EBLs e VRMs flutuantes. Usados em conjunto com o cursor, eles podem medir o rumo e o alcance de quaisquer dois pontos no visor. Este é um recurso muito útil ao usar o radar para pilotagem cega , pois o cursor flutuante com a prática pode substituir o desenho de linhas de chinagraph na face do visor.
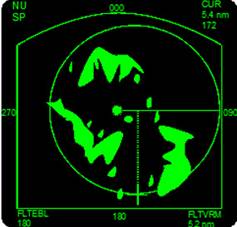
Na figura à esquerda, a embarcação está em um curso de 090°T. A posição do cursor é dada a partir do centro da tela como, em um rumo de 172° em uma faixa de 5,4 nm.
As origens flutuantes de EBL e VRM foram definidas para o ponto de virada da embarcação logo à frente da ilha a estibordo da embarcação. Para a próxima etapa da passagem da embarcação, o curso será de 180° e a distância de 5,2 milhas náuticas, medida pelo cursor flutuante.
Distância ao horizonte do radar
Como mencionado anteriormente, o radar, devido ao radar de refração, pode ver cerca de 6% mais longe do que podemos ver visualmente.
É possível descobrir a que distância você poderia esperar detectar um alvo usando uma fórmula matemática simples. A fórmula assume o seguinte:
- condições atmosféricas padrão
- pulsos de radar são suficientemente poderosos
- o alvo retornará ecos detectáveis
- as condições meteorológicas (por exemplo, chuva) não atenuarão o sinal
Alcance em milhas náuticas = 2,21 Ö h + 2,21 Ö H
onde :
Ö = raiz quadrada
h = altura do scanner em metros
H = altura do alvo em metros
Esta distância + Esta distância

Exemplo
Qual seria o alcance teórico de detecção de um objeto de 16 metros de altura, de um navio com altura aérea de 4 metros?
Alcance em milhas náuticas = 2,21 Ö h + 2,21 Ö H
= 2,21 x 4 + 2,21 x 2
= 8,84 + 4,42
= 13,3 milhas náuticas
Setores de sombra
O radar funciona muito como uma câmera com flash, pois fornece sua própria luz (na forma de ondas de rádio) para tirar uma foto instantânea. Como uma câmera e lente, o instantâneo do radar só verá o que é refletido de volta para a antena do radar. Assim, tudo o que estiver atrás do objeto que é o refletor, ou seja, na sua sombra, ficará invisível ao radar.

Na exibição do radar à esquerda, tanto a embarcação quanto a baía na qual ela está ancorada não serão visíveis na tela do radar.
Ambos estão na área de sombra projetada pelo promontório da ilha
Um bom exemplo disso é uma cabeceira, o radar não pode ver através da cabeceira assim como você não pode, então qualquer coisa atrás da cabeceira ficará escondida na área de sombra do radar. Na exibição do radar acima, tanto a embarcação quanto a baía na qual está ancorada não serão visíveis, ambas estão na área de sombra lançada pelo promontório das ilhas.

A exibição acima representa uma ilha com uma ilha menor na baía e um monumento na praia. As linhas sólidas provenientes do veleiro representam o feixe do radar e as linhas pontilhadas indicam a extensão da área de sombra projetada atrás da ilha menor. Na visão do radar, as praias baixas não são visíveis, mas o monumento é, no entanto, parece ser uma pequena ilha ou um navio fundeado.
A pequena ilha no lado direito se fundiu com a península devido à distorção da largura do feixe. A embarcação ancorada não é visível, pois fica na área de sombra do navio de cruzeiro. Apenas os topos das montanhas atrás da praia aparecem na área de sombra.
Fixação de posição
A navegação por radar é semelhante à navegação tradicional, pois você precisa identificar pontos de referência, medir sua posição em relação à sua e usar essas medições para estabelecer uma posição no gráfico. A fixação do radar é muitas vezes mais rápida do que tomar rumos com uma bússola magnética e é uma técnica mais profissional do que simplesmente transferir uma latitude e longitude do GPS.
A precisão da correção depende de muitos fatores, incluindo a habilidade do operador, fatores ambientais e o equipamento usado. A precisão melhorará à medida que o alcance operacional diminuir, portanto, quanto mais próximo você estiver dos alvos, mais precisa será a fixação, quando você mais precisar.
Fixação por rolamentos de radar
O fator crucial na navegação por radar é identificar corretamente as características visíveis do radar que são reconhecíveis na carta, bem como na tela do radar. Torres, monumentos, edifícios e outras características proeminentes que são favoritas da navegação por bússola não serão visíveis no radar. No entanto, objetos como promontórios, ilhas, bóias e balizas serão, com a vantagem adicional de serem igualmente utilizáveis de dia ou de noite.
Fixação por faixas de radar
O radar é inerentemente melhor na faixa de medição do que na medição de rolamentos: afinal, faixas de medição é para o que ele foi projetado especificamente. Portanto, o rumo da embarcação é irrelevante ao tomar um intervalo, a maior fonte de erro, erro de guinada, é eliminada. Normalmente, a precisão do alcance do radar é melhor que 1% da escala de alcance em uso.
O método usual de obter uma posição fixa na carta a partir dos alcances do radar é usar um par de bússolas e desenhar “círculos de posição” de pelo menos três objetos conspícuos identificados amplamente espaçados. Escolha objetos próximos ao barco, pois isso melhorará a precisão. Em seguida, meça os intervalos com o VRM. Observe as faixas, então pegue um compasso e marque cada faixa no gráfico, com o ponto cardinal de metal no contato em cada caso. Arcos curtos perto de sua posição DR são suficientes, rotule os arcos com uma ponta de seta em cada extremidade. O ponto onde essas linhas circulares de posição se cruzam marca sua posição.

Localização de longo alcance
Experiência e habilidade são os pré-requisitos necessários ao fazer um landfall por radar após uma travessia oceânica. A longo alcance, quando a linha costeira está abaixo do horizonte do radar, a identificação de características topográficas do interior com ecos na tela é uma questão de alguma dificuldade e requer planejamento prévio considerável.
A faixa na qual as feições de terreno aparecerão no visor dependerá de muitos fatores discutidos nas seções anteriores, como a altura da feição e do scanner, as condições climáticas e a direção de onde a terra é vista. Portanto, alguma preparação é necessária quando se pretende fazer um pouso com o auxílio do radar.
O navegador deve ter um conhecimento profundo das capacidades e limitações do seu radar. As condições meteorológicas deverão ser levadas em consideração ao calcular o alcance do radar em que vários recursos terrestres podem aparecer no visor. A preparação deve começar estudando primeiro o caráter da costa dentro de uma distância razoável de cada lado de sua posição estimada e destacando os recursos que provavelmente retornarão os primeiros ecos. Sem experiência local anterior, uma posição obtida a partir de menos de três ecos positivamente identificados deve ser tratada com ceticismo. Lembre-se que o eco mais forte não é necessariamente a montanha mais alta, nem precisa que o primeiro eco visto seja necessariamente o objeto mais alto acima do horizonte do radar.
Em muitos casos, porém, a primeira indicação de terreno será um único eco indistinto no visor. Com um único eco, se qualquer tipo de posição for obtida, tanto o alcance quanto o rumo terão que ser usados. Além da precisão do rumo, sempre deve haver dúvidas consideráveis sobre qualquer posição obtida a partir de um único eco. Não assuma apenas que o eco que aparece na tela é o alvo que você está procurando. Sondagens em particular podem fornecer uma verificação útil em qualquer posição obtida de um eco de sinal. Trate a correção com ceticismo até que mais ecos apareçam.
Um método para plotar uma posição no gráfico quando três ou mais objetos aparecem na tela é usar uma folha de papel vegetal. Com a posição do navio marcada no centro da folha, transfira o verdadeiro rumo e alcance dos ecos no visor para o papel vegetal usando a escala de latitude da carta. Coloque o papel vegetal sobre a carta com a posição marcada do navio perto da posição DR do navio e oriente o papel vegetal para o norte verdadeiro. Em seguida, mova o papel vegetal até que todos os ecos plotados correspondam aos recursos mapeados esperados para dar respostas. A posição do navio é então marcada na carta perfurando o papel vegetal na carta.
Uma folha de plotagem de plástico transparente conhecida como ponteiro de estação de radar foi especialmente produzida como Admiralty Chart 5028 para essa finalidade.
Pilotagem
Uso de radar para navegação costeira
Embora a precisão do alcance do radar seja alta, a precisão do rumo do radar é baixa quando comparada com as observações visuais. Portanto, as correções assistidas por radar mais precisas são obtidas em ordem decrescente por:
- uma combinação de rolamentos visuais de objetos proeminentes e faixas de radar
- alcances de radar de pelo menos três objetos proeminentes
- alcance do radar e rumo do radar de uma única característica proeminente.
Ao selecionar características costeiras proeminentes para um alcance de radar, um objeto alto e íngreme na direção do observador é a melhor escolha e o alcance do radar obtido pode ser relacionado diretamente ao gráfico com pouco ou nenhum erro. Três desses objetos separados em direção por cerca de 45° produzirão as correções mais precisas.
Nenhuma feição costeira deve ser usada em uma posição de radar até que a feição tenha sido positivamente identificada na carta. Na prática, ao desacelerar, o que é feito é obter uma correção usando três intervalos conhecidos e, ao mesmo tempo, obter alguns intervalos de outros pontos na tela que são considerados recursos proeminentes. Depois de plotados os três objetos identificados, os demais são plotados e se passarem pela posição dá prova razoável de identificação. Após os novos objetos terem sido verificados desta forma algumas vezes, eles podem ser usados com confiança.
Ao passar ao longo de costas com perigos distantes, um alcance de radar pode ser usado para ultrapassar um perigo a uma distância segura. Isso é feito desenhando um círculo de alcance no gráfico a partir de uma característica proeminente, como um promontório, e desenhando sua linha DR tangencialmente ao círculo de perigo. Com o VRM definido na distância necessária, a embarcação pode ser mantida na rota pretendida, mantendo o marcador de rumo a essa distância da cabeceira. Isso é ainda mais fácil de fazer se você desenhar uma linha de chinagraph na tela, à distância certa da marca de direção e paralela a ela. Veja a figura 10.

No gráfico mostrado acima, o navegador está consertando sua embarcação usando uma combinação de alcances de radar e rumos visuais. O navegador também tomou precauções adicionais ao passar pelas seções estreitas entre os recifes de traçar círculos de alcance a partir dos promontórios. Ao definir o VRM para a distância necessária e manter o marcador de rumo do radar a essa distância do promontório ou, melhor ainda, traçar uma linha com um lápis chinês paralelo ao marcador de rumo, a embarcação tem a garantia de navegar ao longo da rota pretendida. Essa técnica é conhecida como pilotagem cega ou indexação paralela.
Mostrado abaixo, o navegador planejou sua abordagem para negociar a passagem estreita entre os recifes. O diagrama à esquerda mostra a exibição do radar sobreposta ao gráfico. O diagrama à direita mostra a exibição do radar (proa do navio) como o
navegador vê. No diagrama à direita, o VRM foi definido para 1 milha e o navegador desenhou uma linha com um lápis chinês na tela apenas tocando o VRM e paralela ao marcador de rumo na tela do radar. Para negociar a passagem com segurança, tudo o que o navegador deve fazer é controlar sua embarcação para manter o VRM apenas tocando a linha de lápis.

Pilotagem cega ou indexação paralela
A praticagem cega ou indexação paralela envolve a navegação de uma embarcação ao longo de uma rota pré-planejada em águas tão confinadas que os métodos convencionais de navegação (transferência de rumos visuais e alcances de radar para o gráfico) são impraticáveis porque não podem ser feitos com rapidez suficiente. Aqui o radar se destaca, com algum pré-planejamento, sua apresentação gráfica, mostrando a posição da embarcação no contexto de seus arredores imediatos, pode ser interpretada pelo navegador instantaneamente e a embarcação é controlada diretamente da exibição do radar à luz do dia ou na escuridão.
Uma apresentação do norte para cima é muito superior à exibição do navio para fins de pilotagem pelos seguintes motivos:
- a tela é orientada para parecer igual ao ambiente
- a exibição é estabilizada para que você não perca a imagem ao alterar o curso, apenas o marcador de rumo se move
· o processo de pré-planejamento é simplificado.
A chave para uma pilotagem bem-sucedida é um planejamento meticuloso, preparando com bastante antecedência o plano de pilotagem do que deve acontecer, do que pode acontecer e estar preparado para ambas as contingências.
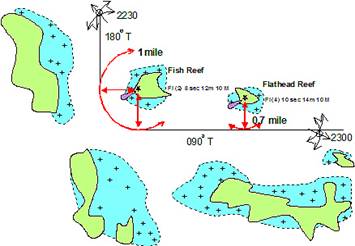
Acima é mostrado um plano de pilotagem para negociar uma mudança de curso de 90° entre os recifes. A rota pretendida da embarcação foi traçada na carta e a posição da embarcação será fixada de maneira normal até cerca de uma milha de Fish Reef Light. As técnicas de pilotagem por radar serão empregadas a partir deste ponto. VRM 1 é definido para 1 milha e o marcador de proa mantém essa distância do Fish Reef Light ou uma linha de lápis chinês traçada paralelamente a uma distância de 1 milha ao marcador de proa, até que a embarcação esteja no través do Fish Reef Light.
O leme é então colocado a bombordo e a embarcação mantida a uma distância de 1 milha do Fish Reef Light até que o marcador de proa com VRM 2 definido a uma distância de 0,7 milhas seja essa distância do Flathead Reef Light. Se o seu radar tiver apenas um VRM, o VRM terá que ser ajustado continuamente entre as duas configurações. Alternativamente, uma linha de lápis chinês pode ser desenhada na tela do radar.
Quando estiver no feixe do Flathead Reef Light, a posição da embarcação será novamente corrigida da maneira normal.
8. Prevenção de Colisão
O radar é uma das ferramentas mais eficazes dos marinheiros, seu imenso valor reside em seu duplo propósito de navegação por radar e prevenção de colisões. Para obter o maior valor da capacidade de detecção do radar, a plotagem do radar é necessária, em vez de apenas olhar a tela e fazer suposições quanto às intenções da outra embarcação.
Na década de 1950, o radar foi desenvolvido amplamente instalado na maioria das embarcações comerciais maiores. A princípio, dada a capacidade dos radares de ver através da escuridão, neblina e chuva, muitos marinheiros acreditaram que não havia mais necessidade de reduzir a velocidade em visibilidade restrita. Esse equívoco resultou em colisões assistidas por radar, como a entre o Andrea Doria e o Stockholm e continuou como no Tricolor .
Essas séries de colisões demonstraram que a capacidade do navegador de interpretar e usar as informações do radar era tão importante quanto o próprio radar. No centro do uso eficaz do radar, o operador deve ter um entendimento dos princípios de operação do radar, bem como um entendimento do movimento relativo.
Aviso prévio de risco de colisão
EBL e VRM
Um método rápido e fácil para estabelecer se um risco de colisão pode ou não estar se desenvolvendo com outra embarcação no radar é posicionar o EBL sobre o centro do contato, como se fosse fazer uma marcação. Se depois de dois ou três minutos o contato parecer estar se movendo em direção ao centro da tela e ao longo do EBL, pode haver risco de colisão. Um gráfico de radar deve então ser iniciado ou o alvo capturado pelo Automatic Radar Plotting Aid (ARPA).

Na sequência acima, é mostrado um contato se aproximando em um rumo relativo estável de 215°. Está a desenvolver-se um risco de colisão.
Eco Trilhas
A maioria dos radares modernos possui um recurso chamado plotagem de eco ou plotagem. Esse recurso mostra a posição anterior dos ecos e, portanto, o movimento de cada eco, exibindo suas posições anteriores em intervalos regulares. O intervalo de plotagem pode ser selecionado pelo operador geralmente começando em 15 segundos para plotagem contínua.
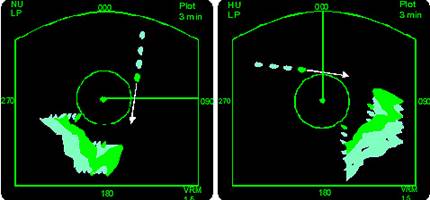
A exibição à esquerda representa uma exibição estabilizada de norte para cima e mostra uma embarcação em um curso de 090° e um alvo sendo plotado em intervalos de três minutos. Mentalmente ou usando um lápis chinês diretamente na tela, extrapolando a linha que os ecos anteriores fizeram e ajustando o VRM dará o ponto de aproximação (CPA) mais próximo do alvo, neste caso 1,5 nm.
O display à direita mostra a mesma situação, mas desta vez com o head-up display de um navio não estabilizado . Às vezes, esse método de plotagem pode ser muito eficaz, mas em outras ocasiões, especialmente com uma exibição desordenada, a imagem pode se tornar confusa. A experiência é inestimável na avaliação dos alvos mais ameaçadores antes de iniciar a trama.
Zonas de guarda
A maioria dos radares modernos tem a facilidade de incorporar uma zona de proteção no visor que soa um alarme sempre que um contato entra em uma seção predeterminada do visor. A zona de proteção é configurada usando o EBL e o VRM. As zonas de guarda podem ser configuradas por vários motivos, mas um comum seria dar um aviso antecipado da aproximação de outra embarcação.

Uma zona de proteção foi configurada para detectar alvos a uma distância de 2 milhas náuticas desde a proa até 22½° atrás do feixe em ambos os lados da embarcação.
Conforme o alvo a estibordo entra na zona, o alarme soará alertando o operador sobre uma situação potencialmente perigosa.
plotadora reflexiva
Um plotter reflexivo é um dispositivo removível que se encaixa perfeitamente na tela do radar, que é então visualizado através da superfície de plotagem com o mínimo de erro de paralaxe. A superfície semi-prateada reflete a imagem de um lápis chinês para que sempre apareça diretamente acima do alvo. O dispositivo pode ser usado com vantagem ao usar técnicas de indexação paralela na navegação costeira. Ele também pode ser usado com um radar de norte para cima ao traçar para desenhar a trilha OA de um alvo diretamente na tela. O plotter reflexivo tem a vantagem de que o navegador não precisa medir faixas e rumos e transferi-los para outro gráfico, melhorando o tempo de plotagem e evitando algum risco de erro.
Movimento relativo
A principal preocupação do navegador é a navegação segura de sua embarcação até seu destino. Para conseguir isso, perigos fixos, como recifes, devem ser evitados. Para fazer isso, a posição real ou geográfica da embarcação deve ser conhecida.
Também durante o curso de uma viagem, outros perigos de movimento, como embarcações, serão encontrados, e o navegador terá que lidar com um segundo tipo de movimento durante a viagem. Este segundo tipo de movimento lida com o movimento aparente de objetos em movimento e é conhecido como movimento relativo.
O movimento relativo é o movimento medido em relação a um objeto especificado, que pode ou não estar se movendo. Por exemplo, se duas embarcações estiverem navegando no mesmo curso e na mesma velocidade. Ambas as embarcações terão movimento real (geográfico), mas em relação uma à outra parecerão estacionárias.

Resumo do movimento relativo
· Objetos flutuantes estacionários se moverão na tela do radar paralelamente ao nosso curso, na direção inversa e em nossa velocidade.
· Objetos em movimento não mostrarão seu verdadeiro movimento na tela do radar.
· Os alvos em movimento na tela do radar terão um movimento que é uma combinação de seu curso e velocidade e o curso e velocidade de nosso próprio navio.
· As embarcações em rota de colisão terão um movimento em direção ao centro da tela do radar.
O navegador, principalmente para evitar colisões, deve resolver com precisão e rapidez o problema do movimento relativo de outras embarcações em andamento e relacionar esse movimento ao gráfico. Isso poderia ser feito pela trigonometria, mas é mais rápido e fácil de fazer pela geometria.
( Contém extratos cortesia de ANTA e Col Tritton )
Plotagem de Radar
A instrução de plotagem de radar é encontrada no texto complementar encontrado em:
http://www.splashmaritime.com.au/Marops/data/text/Radartex/Radarplottex.htm



